1時間後にページが自動更新されます。
角運動量保存則 \( \omega \)(ギリシャ文字) と \(w \)(アルファベット)は文字の形はよくにているので注意
テキスト4.5.3の解説問題
選択肢
| (1) | \(\Large \cos \gamma\) | (2) | \(\Large \vec w\) | (3) | \(壁面に作用するトルク\) | (4) | \(\Large v_\theta\) | (5) | \(流入する角運動量\) |
| (6) | \(\Large \sin \gamma\) | (7) | \(\Large r\) | (8) | \(\Large \cos \beta\) | (9) | \(\Large w_r\) | (10) | \(\Large -\vec w\) |
| (11) | \(\Large -u\) | (12) | \(\Large v_r\) | (13) | \(\Large \omega (オメガ)\) | (14) | \(\Large \vec u\) | (15) | \(\Large w\) |
| (16) | \(\Large v\) | (17) | \(流体に作用するトルク\) | (18) | \(\Large w_\theta\) | (19) | \(\Large -\vec u\) | (20) | \(\Large \sin \beta\) |
| (21) | \(\Large u\) | (22) | \(流出する角運動量\) |
7月24日18:30〜 解答公開(2割)
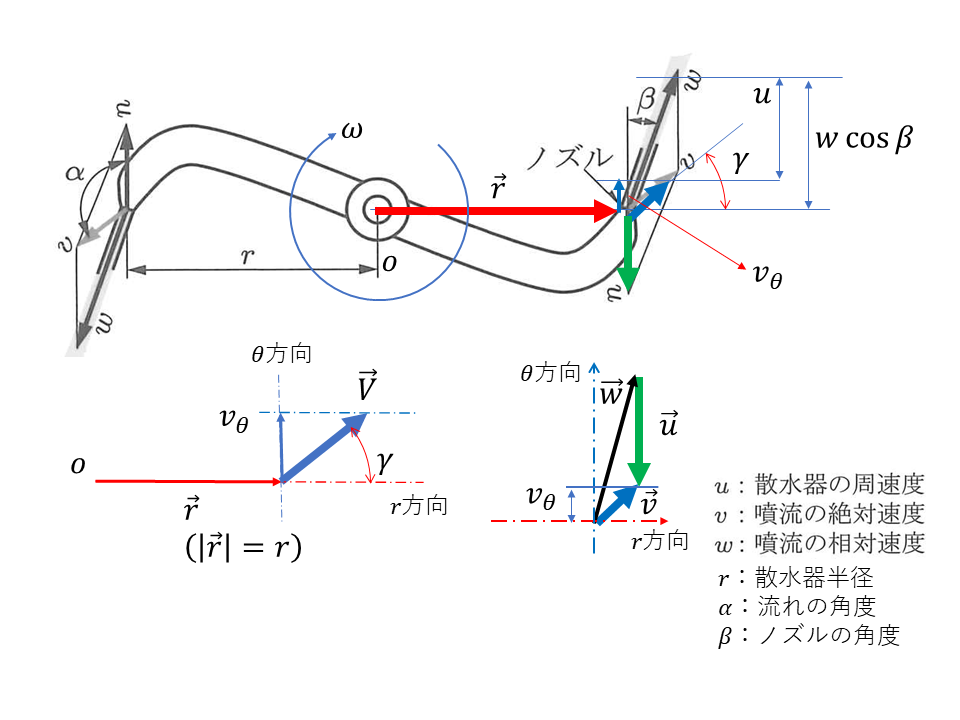
| 速度 | 大きさ | \( r \)方向成分 | \( \theta \)(円周の接線)方向成分 |
| \( \vec r \) | \(r\) | \(r \) | \(0\) |
| \( \vec u \) | \(u\) | \(0 \) | \(-u\) |
| \( \vec v \) | \(v\) | \(v_r \,=\,v \times \cos \gamma \) | \(v_\theta \,=\,v \times \sin \gamma \) |
| \( \vec w \) | \(w\) | \(w_r \,=\,w \times \sin \beta \) | \(w_\theta \,=\,w \times \cos \beta\) |
| (1) 絶対座標から見た片方のノズル噴流の運動量の大きさは \( \rho Q \times v\) となり,\( \theta \) 方向成分は \( \rho Q \times v_\theta \) となる. |
| (2) 絶対座標から見たノズル噴流の角運動量の大きさは \( r \times \rho Q \times v_\theta \) となる. 次にノズル断面積を \( A \) とすると, ノズル噴流速度は\( w \,=\, \frac{Q}{A}\) と表せるので,流出する角運動量を \( w \) で表すことを考える. |
| (3) ノズル位置の周速 \( u \,=\, r \times \omega \) |
| (4) ノズル位置の周速度 \( \vec u \), ノズル噴流の絶対速度 \( \vec v \) , ノズル噴流の相対速度(ノズルから見た速度) \( \vec w \) の関係は \( \vec v \,=\, \vec u + \vec w\) |
| (5) (4)の \( \theta \) 方向成分の関係は \( v_\theta \,=\, w_\theta - u \) |
| (6) (5)を(2)に代入すれば, \( r \times \)\( \rho Q \times ( w_\theta - u ) \) が、流出する角運動量となる. |
| (7) 角運動量保存則は、 流出する角運動量 \(-\) 流入する角運動量 \(=\) 流体に作用するトルク なので,壁面から流体に作用するトルクを \( T_F \) とすれば流体から壁面(散水器)が受けるトルク \( T_S \) は 作用と反作用の関係から,\( T_F = -T_S\) である. |
| (8) 散水器では流入が \( r\,=\,0 \) の位置であるから(流入する角運動量)\( \,= \,0 \) である. 散水器はノズルが2つあるので,散水器に働くトルク \( T_S \) \( T_S \,=\, 2 \times r \times \rho Q \times ( u - w_\theta ) \) |
| (9) (8) \( T_S \) の値が負の場合は時計まわりの回転トルクとなるので, \( T_S \) の大きさとしては, \( 2 \times r \times \rho Q \times ( w_\theta - u ) > 0 \) |